
Scallops are scientifically surveyed and harvested worldwide using dredges that damage the seafloor and risk fishery collapse in vulnerable areas.[1–4] New fishing methods are required that avoid environmental impacts and bycatch.
In a preliminary case study, NIWA is collaborating with the University of Canterbury to develop a machine learning approach (explained in ‘AI and machine learning have the potential to increase efficiencies’) to autonomously identify New Zealand scallops in visual imagery of the seafloor.[5]
Using the range of imagery collected to date, scallops in the images were manually annotated by scientific divers using an interactive annotation app developed by the University of Canterbury,[6] and the resulting annotation data was used to train a convolutional neural network to differentiate scallops from other seafloor features (see section ‘What is AI and how can it help us fish sustainably?’).
While being a long way from application, the idea highlights how AI and robotic technology can disrupt the traditional ways of thinking about harvesting seafood and open up opportunities to resolve the ecosystem impacts of fishing and enhance stocks.
This approach has the potential to underpin the future development of an innovative scallop harvesting system that does not damage the benthic environment, as well as a non-invasive camera-based method of surveying scallops and habitats. The initial work has formed the basis of a collaborative Ministry of Business, Innovation and Employment Endeavour Smart Idea research proposal ‘Transforming scallop fishing: Non-destructive surveying and harvesting for economic acceleration and kaitiakitanga’ and a PhD study ‘Autonomous identification and sizing of scallops in situ’.
While being a long way from application, the idea highlights how AI and robotic technology can disrupt the traditional ways of thinking about harvesting seafood and open up opportunities to resolve the ecosystem impacts of fishing and enhance stocks.

Underwater stereo-camera used for image capture fieldwork. The camera was operated by NIWA scientific divers, ‘flying’ the camera along pre-deployed transect lines at each site, with the camera set at forward looking and vertical face-down angles. Image credit: James Williams.
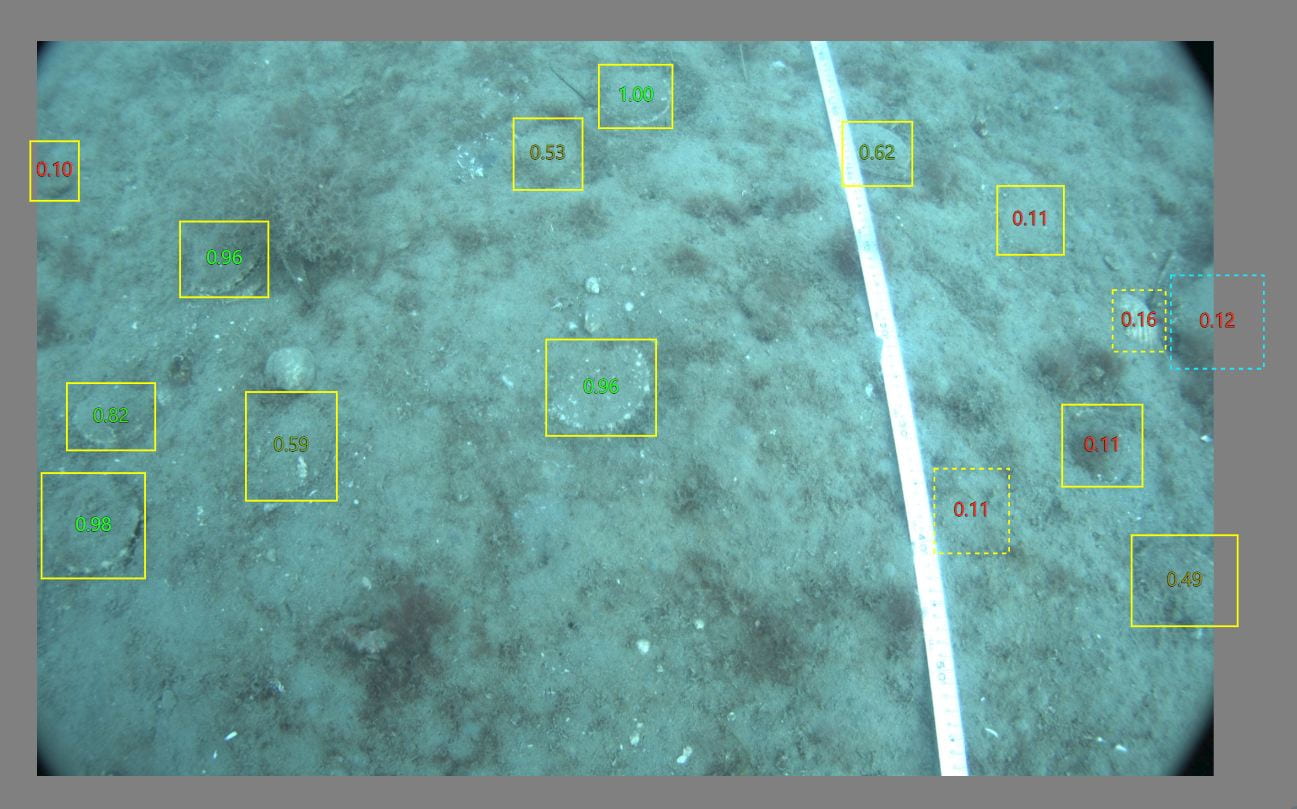
An example an annotated image from Whangārei Harbour. Image credit: NIWA.
References and footnotes
[1] Thrush, S. F. and Dayton, P. K. (2002) Disturbance to marine benthic habitats by trawling and dredging: Implications for marine biodiversity, Annual Review of Ecology and Systematics, 33, pp. 449–473.
[2] Ferraro, D. M. et al. (2017) Estimates of sea scallop (Placopecten magellanicus) incidental mortality from photographic multiple before-after-control-impact surveys, Journal of Shellfish Research, pp. 615–626.
[3] Stewart, B. D. and Howarth, L. M. (2016) Quantifying and managing the ecosystem effects of scallop dredge fisheries, Developments in Aquaculture and Fisheries Science, Elsevier.
[4] Williams, J. R. et al. (2019) Dredge survey of scallops in Marlborough Sounds, May 2019, New Zealand Fisheries Assessment Report 2019/69.
[5] Williams, J.R. (2020) Scallop image capture, NIWA strategic science investment fund achievement report for 2019-20 project CONC2003, Unpublished report held by NIWA Auckland.
[6] Batchelor, O. and Green, R. (2019) Object detection for verification-based annotation, International Conference Image and Vision Computing New Zealand, 2019.